الفرق بين GPS و DGPS

المحتوى
GPS و DGPS هما أنظمة الملاحة عبر الأقمار الصناعية. يكمن الفرق الأساسي بين GPS و DGPS في دقتها ، DGPS أكثر دقة من GPS. تم تصميم DGPS عمداً لتقليل تدهور الإشارة.
يوفر نظام GPS دقة تبلغ حوالي 10 أمتار ، لكن DGPS يمكن أن توفر دقة حوالي 1 متر ، حتى بعد ذلك عن 10 سم.
- رسم بياني للمقارنة
- تعريف
- الاختلافات الرئيسية
- خاتمة
رسم بياني للمقارنة
| أساس للمقارنة | GPS | DGPS |
|---|---|---|
| عدد أجهزة الاستقبال المستخدمة | واحد فقط ، أي جهاز استقبال GPS مستقل | اثنان ، روفر وأجهزة الاستقبال الثابتة |
| صحة | 15-10 م | 10 سم |
| مجموعة من الصكوك | عالمي | محلي (ضمن 100 كم) |
| كلفة | بأسعار معقولة بالمقارنة مع DGPS | مكلفة |
| نطاق الترددات | 1.1 - 1.5 جيجا هرتز | يختلف وفقا للوكالة |
| العوامل المؤثرة في الدقة | التوافر الانتقائي ، توقيت الأقمار الصناعية ، الظروف الجوية ، الأيونوسفير ، التروبوسفير والمسيرات المتعددة. | المسافة بين المرسل و روفر ، الأيونوسفير ، التروبوسفير و المسيرات المتعددة. |
| نظام تنسيق الوقت المستخدم | WGS84 | نظام الإحداثيات المحلي |
تعريف GPS
نظام تحديد المواقع العالمي (GPS) يوفر الموقع الدقيق لجسم ما على الأرض. ويستخدم الإشارات في الوقت المناسب الناتجة عن الأقمار الصناعية التي تدور حول الأرض. يتضمن GPS كوكبة من 24 قمرا صناعيا وأخرى لغرض النسخ الاحتياطي. يتم استخدام أربعة أقمار صناعية للحصول على الموضع الدقيق ، وتعرف هذه العملية بثلاثية الأبعاد.
تستخدم تقنية GPS أجهزة الاستقبال المستقلة ، حيث يتم حساب الموقع مباشرةً. هذه التقنية عرضة لأخطاء مثل أخطاء ساعة القمر الصناعي غير المصححة ، خطأ القمر الصناعي للمعلمة المدارية ، التأخيرات الأيونوسفيرية والتروبوسفيرية ، أخطاء المسيرات المتعددة ، الأخطاء الهندسية وأخطاء اختيار المسند. للحد من هذه الأخطاء يتم تطوير تقنيات جديدة. GPS يمكن الحصول على دقة اسمية من 10-15 متر.
تعريف DGPS
نظام تحديد المواقع العالمي التفاضلي (DGPS) هو تحسين لنظام تحديد المواقع. يمكن أن تحقق تقنية DGPS دقة تصل إلى 10 سم. فهو يقلل أو يلغي تدهور الإشارة ، مما يؤدي إلى تحسين الدقة. الهدف من نظام تحديد المواقع التفاضلي هو عدم الذهاب مباشرة إلى الموقع ؛ بدلا من ذلك يجد الموقع بالنسبة إلى نقطة مرجعية ثابتة. تعتمد DGPS على جهازي الاستقبال rover والمستقبل المرجعي ، rover هو المستخدم ، والمستقبل المرجعي يعرف أيضًا باسم المستقبل الثابت.
جهاز الاستقبال الثابت ثابت ، وموقعه معروف للنظام. يتم بث معلومات القمر الصناعي بشكل مستمر في اتجاه البرج المتحرك وبرج المحطة الأساسية. يستخدم برج المحطة الأساسية موقعه المعروف لحساب التوقيت الدقيق. جهاز الاستقبال الثابت هو المعلومات التي يتم إرسالها إلى جهاز الاستقبال المتنقل لتصحيح القياسات بمساعدة الوضع النسبي للمستقبل الثابت.
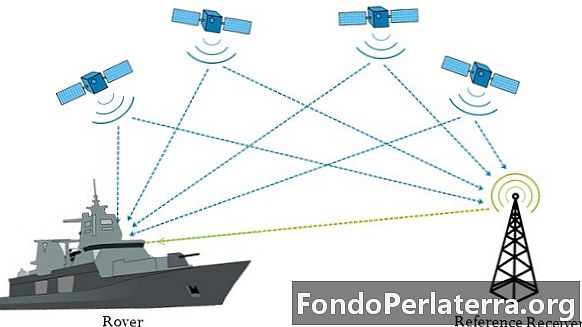
- في نظام تحديد المواقع العالمي (GPS) ، يوجد مستقبل مستقل يستقبل إشارات من القمر الصناعي ، بينما في DGPS يوجد مستقبلان ومستقبل مرجعي وجهاز روفر (مستخدم) حيث يستقبل روفر إشارة معايرة من جهاز الاستقبال المرجعي (محطة قاعدة ثابتة).
- دقة نظام GPS حوالي 15 مترا. من ناحية أخرى ، فإن DGPS أكثر دقة ويمكن أن تحقق دقة تصل إلى 10 سم.
- تغطي أدوات GPS النطاق الواسع ويمكن استخدامها عالميًا بينما تغطي أدوات DGPS مدىًا قصيرًا يصل إلى 100 كم ، لكن هذا النطاق قد يتغير وفقًا لنطاق التردد.
- نظام GPS أقل تكلفة مقارنة بنظام DGPS.
- يتراوح تردد الإشارة الذي ترسله الأقمار الصناعية في نظام GPS بين 1.1 إلى 1.5 جيجا هرتز. على العكس من ذلك ، في DGPS لا ترسل الأقمار الصناعية مجموعة ثابتة من التردد ، يعتمد التردد المرسل على الوكالات.
- تتمثل العوامل التي تؤثر على دقة نظام GPS في التوافر الانتقائي وتوقيت القمر الصناعي وظروف الغلاف الجوي والأيونوسفير والتروبوسفير والمسارات المتعددة. على النقيض من ذلك ، يتأثر نظام DGPS بالمسافة بين المرسل والمركبة ، الأيونوسفير ، التروبوسفير والمسيرات المتعددة ولكن بدرجة أقل.
- يستخدم GPS نظام إحداثيات التوقيت WGS84 وهو نظام أرضي ثابت ، وموقع الأرض ، وبيانات جيوديسية. مقابل DGPS يستخدم نظام الإحداثيات المحلي.
خاتمة
نظام تحديد المواقع العالمي التفاضلي (DGPS) هو تقنية أكثر دقة من نظام تحديد المواقع العالمي السابق (GPS). تم تحسين الدقة في DGPS باستخدام مستقبلين بدلاً من استخدام واحد ، والذي يجد الموقع الدقيق باستخدام المواضع النسبية.





